Forschungsgruppe
Sonaro – Smarte Objektübernahme und -übergabe für die nutzerzentrierte mobile Assistenzrobotik
12.06.2025
Partner: TU Ilmenau, Hochschule Schmalkalden, GFE Schmalkalden
Die Entwicklung von Anwendungen für Industrie 4.0, aber auch „Smart Health“ ist geprägt von einem zunehmenden Einsatz intelligenter interaktiver Systeme für die Mensch-Maschine-Interaktion (MMI). So werden im Bereich “Smart Health” Assistenzroboter das Pflegepersonal bei typischen Pflegetätigkeiten unterstützen und als Assistenten mit Zureich- oder Übernahmefunktion fungieren. Ähnliche, auf intelligente Handlangertätigkeiten basierende Assistenzfunktionen werden auch in anderen Tätigkeitsbereichen wie der industriellen Fertigung (z. B. Montage) oder im Handwerksbereich Einzug halten, wenn es gelingt, die Assistenzroboter so zu gestalten, dass Nutzer und Roboter der aktuellen Situation entsprechend kooperativ und hoch effizient Hand in Hand zusammenarbeiten können.
Neue Ansätze für sichere und adaptive Mensch-Roboter-Interaktionen
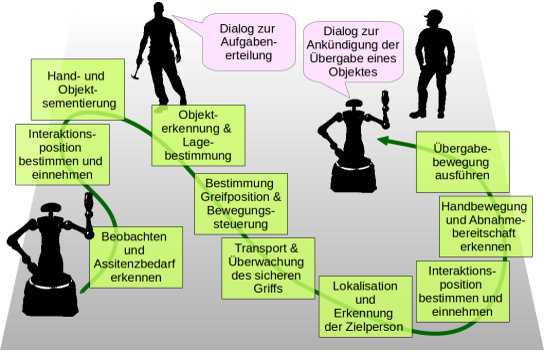
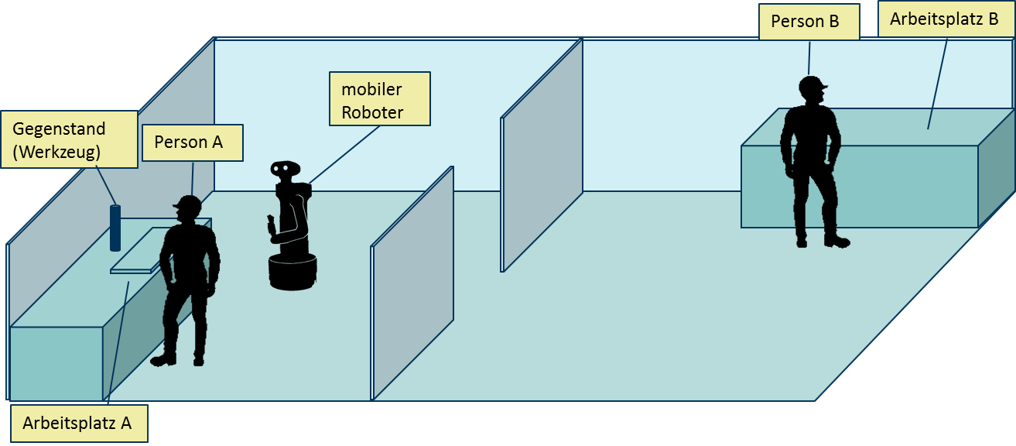
Vor diesem Hintergrund sollen im Rahmen der Forschungsgruppe für die Mensch-Roboter-Kollaboration neuartige Lösungen zur smarten Objektübergabe und -übernahme erforscht werden, die für die Weiterentwicklung der interaktiven Assistenzrobotik essentiell sind und deutlich über den gegenwärtigen Stand der Technik hinausgehen. Sie sollen es erlauben, dass Assistenzroboter bei ihrer Interaktion mit dem Menschen situativ ihre Handlungen an den Menschen und dessen aktuelle Tätigkeiten anpassen und damit sozial akzeptabel werden. Im Rahmen des angestrebten smarten Übernahme/Übergabeszenarios bedeutet dies, dass der Assistenzroboter bei einer Objektübernahme die Haltepose und Greifposition der Hand des Übergebenden am Objekt erkennen und daraufhin das Objekt auf eine alternative Art und Weise sicher greifen und übernehmen kann, ohne dabei den Menschen zu gefährden. Im weiteren Verlauf ist das übernommene Objekt dann sicher zu einem weiteren Akteur zu transportieren und gefährdungsfrei an diesen zu übergeben. Die hierfür erforderlichen dynamischen Prozesse erfordern eine kontaktlose Überwachung und Analyse des gemeinsamen Interaktionsraumes und der aktuellen Aktivitäten der Interaktionspartner.
Dies erfordert intensive Forschungsarbeiten auf folgenden Gebieten:
- Wahrnehmung der Handhaltung und sichere Unterscheidung von Händen und zu übergebenden Objekten (Situationserkennung)
- Robuste Erkennung der zu übernehmenden/übergebenden Objekte und deren Lagebestimmung (Objekterkennung und Lagebestimmung)
- Exakte Selbstlokalisation des Roboters und seiner Manipulatorik im Raum auf Basis einer exakten Umgebungsmodellierung (Raumlokalisierung)
- Nutzerzentrierte Navigation und Greifbewegungssteuerung für die Objektübernahme bzw. Übergabe (Nutzerzentrierte Navigation und Zugriff)